Салон штор в Санкт-Петербурге




Схема включения асинхронного двигателя
звезда, треугольник, трехфазная сеть 380В, однофазная сеть 220В
Практически ежедневно мы сталкиваемся с одним и тем же вопросом от наших клиентов: «как подключить электродвигатель к сети питания?»
Самый простой и надежный способ – обратиться к нормальному электрику и не экономить на этом, т.к. зачастую, пытаясь сэкономить, приглашают «дядю Васю», или других отзывчивых «специалистов», которые рядом, но на самом деле слабо понимают, что происходит.
В лучшем случае, эти «профи» звонят и спрашивают – правильно ли я подключаю. Тут ещё есть шанс не спалить двигатель. Сразу становится понятна квалификация «электрика», когда задают такие вопросы, от которых можно просто впасть в ступор (так как именно этому и учат электриков).
Например:
- зачем шесть контактов в двигателе?
- а почему контактов всего три?
- что такое «звезда» и «треугольник»?
- а почему, когда я подключаю трехфазный насос и ставлю поплавковый выключатель, который рвёт одну фазу, двигатель не останавливается?
- а как измерить ток в обмотках?
- что такое пускатель?
и т.п.
Если ваш электрик задаёт такие вопросы, то нужно его отправить туда, откуда он пришёл. Иначе всё закончится сгоревшим электродвигателем, потерей денег, времени, дорогостоящим ремонтом. Давайте попробуем разобраться в схемах подключения электродвигателя к электропитанию.
Для начала нужно понимать, что существуют несколько популярных типов сетей переменного тока:
1. Однофазная сеть 220 В,
2. Трехфазная сеть 220 В (обычно используется на кораблях),
3. Трехфазная сеть 220В/380В,
4. Трехфазная сеть 380В/660В.
Есть ещё на напряжение 6000В и некоторые другие редкие, но их рассматривать не будем.
В трёхфазной сети обычно есть 4 провода (3 фазы и ноль). Может быть ещё отдельный провод «земля». Но бывают и без нулевого провода.
Как определить напряжение в вашей сети?
Очень просто. Для этого нужно измерить напряжение между фазами и между нулём и фазой.
В сетях 220/380 В напряжение между фазами (U1, U2 и U3) будет равно 380 В, а напряжение между нолём и фазой (U4, U5 и U6) будет равно 220 В.
В сетях 380/660В напряжение между любыми фазами (U1, U2 и U3) будет равно 660В, а напряжение между нулем и фазой (U4, U5 и U6) будет равно 380 В.
Возможные схемы подключения обмоток электродвигателей
Асинхронные электродвигатели имеют три обмотки, каждая из которых имеет начало и конец и соответствует своей фазе. Системы обозначения обмоток могут быть разными. В современных электродвигателях принята система обозначения обмоток U, V и W, а их выводы обозначают цифрой 1 начало обмотки и цифрой 2 – её конец, то есть обмотка U имеет два вывода: U1 и U2, обмотка V – V1 и V2, а обмотка W – W1 и W2.
Однако до сих пор ещё в эксплуатации находятся старые асинхронные двигатели, сделанные во времена СССР и имеющие старую советскую систему маркировки. В них начала обмоток обозначаются C1, C2, C3, а концы - C4, C5, C6. Значит, первая обмотка имеет выводы C1 и C4, вторая - C2 и C5, а третья - C3 и C6.
Обмотки трёхфазных электродвигателей можно подключать по двум различным схемам: звездой (Y) или треугольником (Δ).
Подключение электродвигателя по схеме звезда
Название схемы подключения обусловлено тем, что при соединении обмоток по данной схеме (см. рисунок справа), визуально это напоминает трёхлучевую звезду.
Как видно из схемы подключения электродвигателя, все три обмотки своим одним концом соединены вместе. При таком подключении (сеть 220/380 В), к каждой обмотке отдельно подходит напряжение 220 В, а к двум обмоткам, соединённым последовательно, – напряжение 380 В.
Основным преимуществом подключения электродвигателя по схеме звезда являются небольшие пусковые токи, так как напряжение питания 380 В (межфазное) потребляют сразу 2 обмотки, в отличие от схемы «треугольник». Но при таком подключении мощность питаемого электродвигателя ограничена (главным образом из экономических соображений): обычно по звезде включают относительно слабые электродвигатели.
Подключение электродвигателя по схеме треугольник
Название этой схемы также идёт от графического изображения (см. правый рисунок):
Как видно из схемы подключения электродвигателя – «треугольник», обмотки подключаются последовательно друг к другу: конец первой обмотки соединяется с началом второй и так далее.
То есть к каждой обмотке будет приложено напряжение 380 В (при использовании сети 220/380 В). В этом случае по обмоткам течёт больший ток, по треугольнику обычно включают двигатели большей мощности, чем при соединении по звезде (от 7,5 кВт и выше).
Подключение электродвигателя к трёхфазной сети на 380 В
Последовательность действий такова:
1. Для начала выясняем, на какое напряжение рассчитана наша сеть.
2. Далее смотрим на табличку, которая есть на электродвигателе, она может выглядеть так (звезда Y /треугольник Δ):
Двигатель для однофазной сети 220В
(~ 1, 220В)
Двигатель для трехфазной сети
220В/380В (220/380, Δ / Y)
Двигатель для трехфазной сети 380В
(~ 3, Y, 380В)
Двигатель для трехфазной сети
(380В / 660В (Δ / Y, 380В / 660В)
3. После идентификации параметров сети и параметров электрического подключения электродвигателя (звезда Y /треугольник Δ), переходим к физическому электрическому подключению электродвигателя.
4. Чтобы включить трёхфазный электродвигатель, нужно одновременно подать напряжение на все 3 фазы.
Достаточно частая причина выхода из строя электродвигателя – работа на двух фазах. Это может произойти из-за неисправного пускателя, или при перекосе фаз (когда напряжение в одной из фаз сильно меньше, чем в двух других).
Есть 2 способа подключения электродвигателя:
- использование автоматического выключателя или автомата защиты электродвигателя
Эти устройства при включении подают напряжение сразу на все 3 фазы. Мы рекомендуем ставить именно автомат защиты электродвигателя серии MS, так как его можно настроить в точности на рабочий ток электродвигателя, и он будет чутко отслеживать его повышение в случае перегрузки. Это устройство в момент пуска даёт возможность некоторое время работать на повышенном (пусковом) токе, не отключая двигатель.
Обычный же автомат защиты требуется ставить с превышением номинального тока электродвигателя, с учётом пускового тока (в 2-3 раза выше номинала).
Такой автомат может отключить двигатель только в случае КЗ или его заклинивания, что часто не обеспечивает нужной защиты.
- использование пускателя
Пускатель представляет собой электромеханический контактор, который замыкает каждую фазу с соответствующей обмоткой электродвигателя.
Привод механизма контактора осуществляется с помощью электромагнита (соленоида).
Устройство электромагнитного пускателя:
Магнитный пускатель устроен достаточно просто и состоит из следующих частей:
(1) Катушка электромагнита
(2) Пружина
(3) Подвижная рама с контактами (4) для подключения питания сети (или обмоток)
(5) Контакты неподвижные для подключения обмоток электродвигателя (сети питания).
При подаче питания на катушку, рама (3) с контактами (4) опускается и замыкает свои контакты на соответствующие неподвижные контакты (5).
Типовая схема подключения электродвигателя с использованием пускателя:
При выборе пускателя следует обращать внимание на напряжение питания катушки магнитного пускателя и покупать его в соответствии с возможностью подключения к конкретной сети (например, если у вас есть только 3 провода и сеть на 380 В, то катушку нужно брать на 380 В, если у вас сеть 220/380 В, то катушка может быть и на 220 В).
5. Проконтролировать, в правильную ли сторону крутится вал.
Если требуется изменить направление вращения вала электродвигателя, то нужно просто поменять местами любые 2 фазы. Это особенно важно при запитывании центробежных электронасосов, имеющих строго определённое направление вращения рабочего колеса
Как подключить поплавковый выключатель к трёхфазному насосу
Из всего вышеописанного становится понятно, что для управления трёхфазным электродвигателем насоса в автоматическом режиме с использованием поплавкового выключателя НЕЛЬЗЯ просто разрывать одну фазу, как это делается с монофазными двигателями в однофазной сети.
Самый простой способ – использовать для автоматизации магнитный пускатель.
В этом случае достаточно поплавковый выключатель встроить последовательно в цепь питания катушки пускателя. При замыкании цепи поплавком будет замыкаться цепь катушки пускателя, и включаться электродвигатель, при размыкании – будет отключаться питание электродвигателя.
Подключение электродвигателя к однофазной сети 220 В
Обычно для подключения к однофазной сети 220В используются специальные двигатели, предназначенные для подключения именно к такой сети, и вопросов с их питанием не возникает, т.к. для этого просто требуется вставить вилку (большинство бытовых насосов оснащены стандартной вилкой Шуко) в розетку
Иногда требуется подключение трехфазного электродвигателя к сети 220 В (если, например, нет возможности провести трехфазную сеть).
Максимально возможная мощность электродвигателя, который можно включить в однофазную сеть 220 В, составляет 2,2 кВт.
Самый простой способ – подключить электродвигатель через частотный преобразователь, рассчитанный на питание от сети 220 В.
Следует помнить, что частотный преобразователь на 220 В, выдает на выходе 3 фазы по 220 В. То есть подключить к нему можно только электродвигатель, который имеет напряжение питания на 220 В трёхфазной сети (обычно это двигатели с шестью контактами в распаячной коробке, обмотки которых можно подключить как по звезде, так и по треугольнику). В данном случае требуется подключение обмоток по треугольнику.
Возможно ещё более простое подключение трехфазного электродвигателя в сеть 220 В с использованием конденсатора, но такое подключение приведёт к потере мощности электродвигателя приблизительно на 30%. Третья обмотка запитывается через конденсатор от любой другой.
Данный тип подключения мы рассматривать не будем, так как нормально с насосами такой способ не работает (либо при старте двигатель не запускается, либо электродвигатель перегревается из-за снижения мощности).
Использование частотного преобразователя
В настоящее время достаточно активно все стали применять частотные преобразователи для управления частотой вращения (оборотами) электродвигателя.
Это позволяет не только экономить электроэнергию (например, при использовании частотного регулирования насосов для подачи воды), но и управлять подачей насосов объёмного типа, превращая их в дозировочные (любые насосы объёмного принципа действия).
Но очень часто при использовании частотных преобразователей не обращают внимания на некоторые нюансы их применения:
- регулировка частоты, без доработки электродвигателя, возможна в пределах регулировки частоты +/- 30% от рабочей (50 Гц),
- при увеличении частоты вращения более 65 Гц требуется замена подшипников на усиленные (сейчас с помощью ЧП возможно поднять частоту тока до 400 Гц, обычные подшипники просто разваливаются на таких скоростях),
- при уменьшении частоты вращения встроенный вентилятор электродвигателя начинает работать неэффективно, что приводит к перегреву обмоток.
Из-за того, что не обращают внимания при проектировании установок на такие «мелочи», очень часто электродвигатели выходят из строя.
Для работы на низкой частоте ОБЯЗАТЕЛЬНО требуется установка дополнительного вентилятора принудительного охлаждения электродвигателя.
Вместо крышки вентилятора устанавливается вентилятор принудительного охлаждения (см. фото). В этом случае, даже при снижении оборотов вала основного двигателя,
дополнительный вентилятор обеспечит надёжное охлаждение электродвигателя.
Мы имеем большой опыт модернизации электродвигателей для работы на низкой частоте.
На фото можно видеть винтовые насосы с дополнительными вентиляторами на электродвигателях.
Данные насосы используются в качестве дозирующих насосов на пищевом производстве.
Надеемся, что данная статья поможет вам правильно подключить электродвигатель к сети самостоятельно (ну или хотя бы понять, что перед вами не электрик, а «специалист широкого профиля»).
Технический директор
ООО "Насосы Ампика"
Моисеев Юрий.
Схема управления асинхронным двигателем с короткозамкнутым ротором. Схема пуска асинхронного двигателя
Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель - аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя - трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей - статора - неподвижной части и ротора - вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле. Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока. Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Основные элементы схемы и их назначение
Автоматический выключатель - аппарат для нечастой ручной коммутации электрических цепей и автоматической защиты их при коротких замыканиях и длительной перегрузке. Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Таблица1. Область применения автоматического выключателя.
Как видно из таблицы 1 автомат не отключается при резком снижении напряжения, так как расцепитель минимального напряжения в применяемом автоматическом выключателе отсутствует. Защиту при значительном снижении или исчезновении напряжения питающей сети осуществляет магнитный пускатель.
Автоматы используют при напряжении до 660В на номинальные токи от 15 до 600А, в помещениях с нормальной окружающей средой, так как они не приспособлены для работы в средах с едкими парами и газами, во взрывоопасных и незащищённых от попадания воды местах. Автоматы необходимо не реже 1 раза в год осматривать, чистить, смазывать шарнирные механизмы приборным маслом. Для своей схемы я выбрал автоматический выключатель серии АП-50. Внешний вид автомата показан на рисунке 3.
1- кнопка выключения, 2-кнопка включения, 3- реле, 4-искрогасительные камеры, 5-пластмассовый кожух
Рис3. Внешний вид и устройство автомата АП-50.
Он предназначен для защиты от перегрузок и токов короткого замыкания при U питающей сети до 500В, 50 гц на переменном токе, для ручного включения и отключения цепей, а главное для пуска и защиты трёхфазных асинхронных двигателей с короткозамкнутым ротором. Выключатель защищён пластмассовым кожухом. Наличие буквы Б в серии АП-50Б означает универсальное исполнение, при котором ввод и вывод проводов снизу и сверху через сальники типа СКВрт-33. Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Магнитный пускатель - коммутационный аппарат дистанционного управления, для частых включений и отключений электрооборудования, которым управляют с помощью отдельно расположенной кнопки. Это устройство для пуска, остановки и защиты электродвигателей. Назначение магнитного пускателя, применённого в схеме, представлено в таблице 2.
Типовые схемы управления электроприводов с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД с короткозамкнутым ротором
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
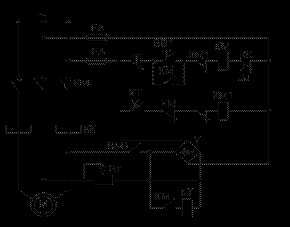
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Для остановки двигателя нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
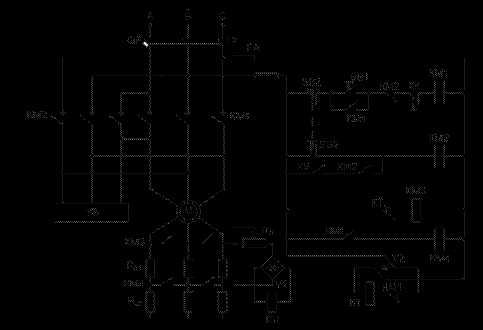
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R д2 , а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R д1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора R р оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0
Для осуществления торможения
двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление R д1 + R д2 .Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS 1 и QS 2 и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора. Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
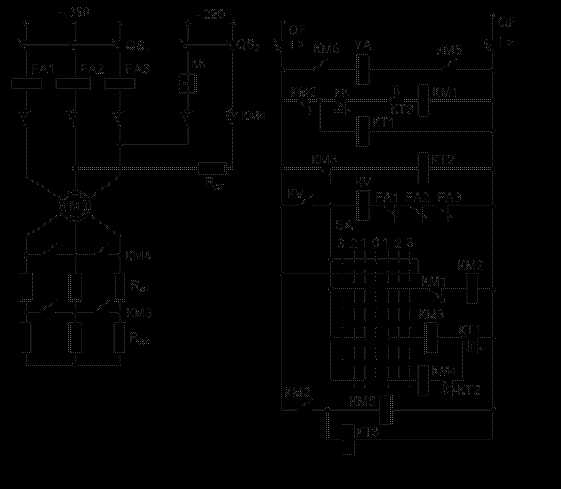
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
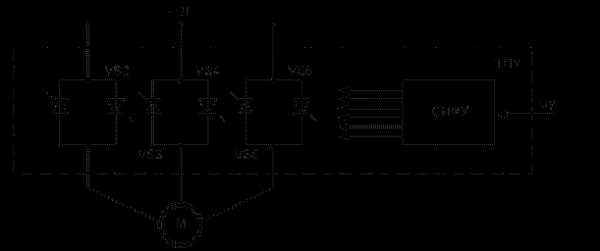
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
 к ак
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ). Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U 1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при пуске может изменяться по различным законам – линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
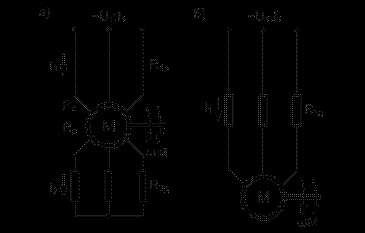
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
1д в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω 0 при включении R 1д не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис.8.15 а).
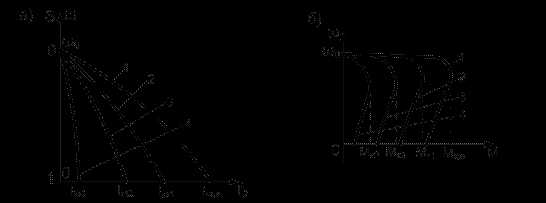
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R 1д = 0, причем большему значению R 1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума М к и S к изменяются при варьировании R 1д , а именно: в соответствии с (8.15) и (8.16) при увеличении R 1д критический момент М к и критическое скольжение S к уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R 1д снижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
Включение добавочных резисторов R 2д в цепь ротора применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R 2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения) пускового тока I кз = I п .
Скорость идеального холостого хода АД ω 0 и максимальный (критический) момент двигателя М к в соответствии с остаются неизменными при регулировании R 2д , а критическое скольжение S к , как это следует из , изменяется.
Выполненный анализ позволяет построить естественную 1 (R 2д = 0) и искусственные 2–3 (R 2д3 > R 2д2 ) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R 2д имеется возможность повышать пусковой момент АД вплоть до критического момента М к без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
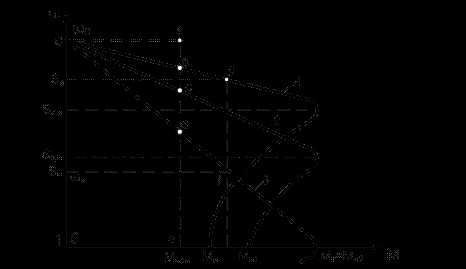
Рис. 8.16. Механические характеристики при различных сопротивлениях R 2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R 2д .
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R 2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R 2д1 ) можно определить по выражению :
, (8.30)
где – сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту М ном , и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R 2д1 определяется как
R 2д1 = R 2ном аb/ас, (8.31)
где – номинальное сопротивление АД; – ЭДС ротора при S = 1; – номинальный ток ротора.
http://life-prog.ru/1_17774_tormoznie-rezhimi-ad.html
15.09.2014Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором. Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя. Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4.10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
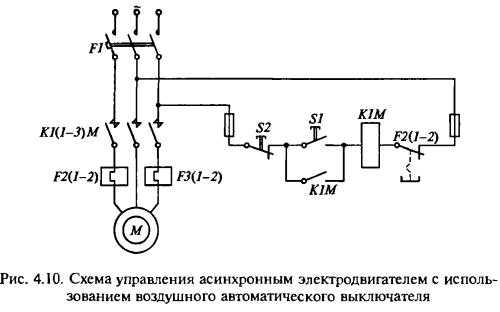
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной - через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 - 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем. Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А - вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением. Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10...15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M. Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма. Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования. Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения. Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя
где Mн - номинальный момент двигателя; nс - синхронная скорость двигателя; I"р - приведенный к статору ток ротора; R"р - полное активное сопротивление ротора, приведенное к статору; nд - относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором. Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1...VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В - V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1...VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1...VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6.2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени. Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок - электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А.1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З - закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора - двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора - двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М - с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А.1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения. Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой - размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой - при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
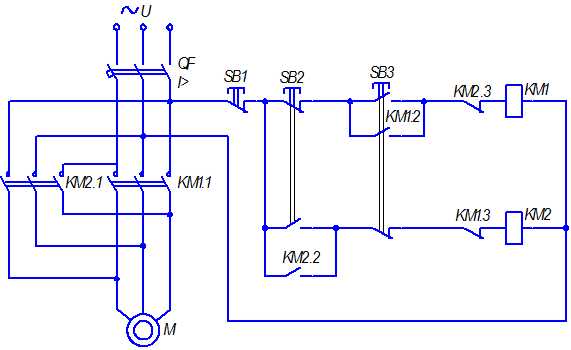
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т.е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
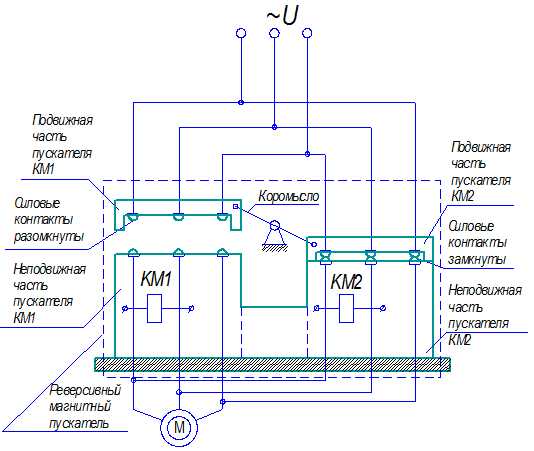
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
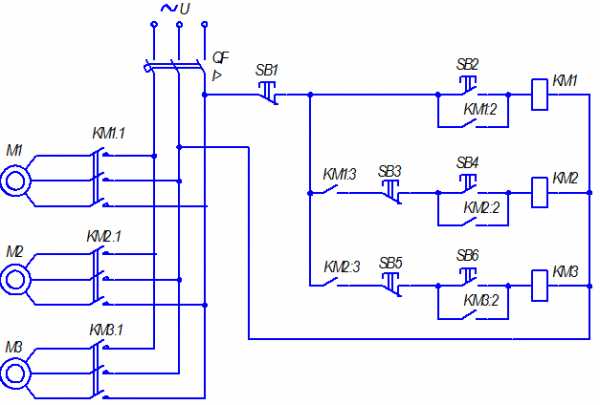
Рис.5.7. Схема последовательного включения двигателей
Пример 5.1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
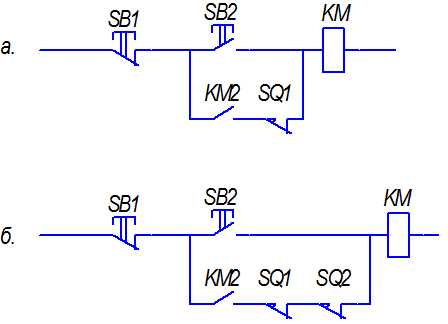
Рис. 5.8 К примеру 5.1
Пример 5.2. В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис. 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 - о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
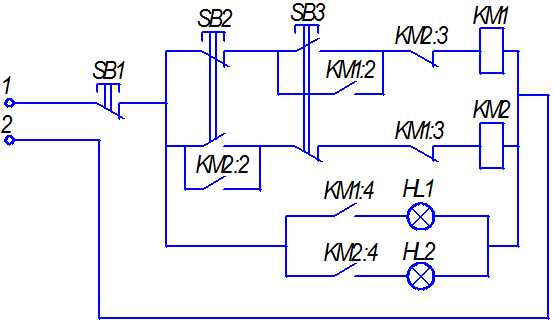
Рис. 5.9 К примеру 5.2
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности в соответствии с его .
Условные обозначения на схемах
(далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя , в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
Реверсивная схема подключения электродвигателя (Как изменить направление вращения электродвигателя?)
Что бы поменять направление вращения трехфазного электродвигателя необходимо поменять местами любые две питающие его фазы:
При необходимости частой смены направления вращения электродвигателя применяется :
В данной схеме применяется два магнитных пускателя (KM-1, KM-2) и трехкнопочный пост, магнитные поскатели применяемые в данной схеме кроме нормально-разомкнутого блок-контакта должны так же иметь и нормально замкнутый контакт.
При нажатии кнопки SB-2 (кнопка «ПУСК 1») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1 который шунтирует кнопку SB-2 и размыкает свой блок-контакт KM-1.2 который защищает электродвигатель от включения в обратную сторону (при нажатии кнопки SB-3) до его предварительной остановки, т.к. попытка запуска электродвигателя в обратную сторону без предварительного отключения пускателя KM-1 приведет к короткому замыканию. Что бы запустить электродвигатель в обратную сторону необходимо нажать кнопу «СТОП» (SB-1), а затем кнопку «ПУСК 2» (SB-3) которая запитает катушку магнитного пускателя KM-2 и запустит электродвигатель в обратную сторону.
10Схема подключения электродвигателя "звезда-треугольник"
Существует два способа пуска асинхронного электродвигателя (схема подключения электродвигателя):
1) Прямой пуск (на обмотки статора подается полное напряжение сети)
2) Пуск при пониженном напряжении (на обмотки статора подается напряжение меньше полного сетевого напряжения)
Прямой пуск проще реализовать, он мене затратен, но обладает большим недостатком: при прямом пуске пусковой ток асинхронного электродвигателя с короткозамкнутым ротором превышает в 5-7 раз номинальный рабочий ток двигателя.
Схема включения обмоток статора “звездой” и “треугольником”
Поэтому на практике для уменьшения пусковых токов асинхронных двигателей различными способами стараются понизить подводимое к обмоткам статора питающее напряжение. Одни из способов снижения напряжения на обмотке статора — переключение обмоток статора со “звезды” на “треугольник”.
Что это дает?
При подключении обмоток статора соединенных в “звезду” (схема подключения электродвигателя «звезда») к источнику с линейным напряжением 380 В фазное напряжение буде в √3 меньше, т.е. равно 220 В.. Зная сопротивление обмотки статора и приложенное напряжение нетрудно рассчитать по закону Ома:
При соединении “звездой”:
Если же обмотки статора соединены “треугольником” (схема подключения электродвигателя «треугольник») и подключены к линейному напряжению 380 В, то фазное напряжение будет 380 В, следовательно:
В результате пуск асинхронного двигателя со схемой подключения обмоток статора “звезда” (схема подключения электродвигателя «звезда») с дальнейшим переходом на схему “треугольник” (схема подключения электродвигателя «треугольник»), позволяет уменьшить пусковой ток в 3 раза по сравнению с пусковым током при прямом пуске. Пуск асинхронных двигателей с короткозамкнутым ротором по схеме звезда-треугольник находит особо широкое распространение в тех случаях, когда нагрузка на валу двигателя изменяется после разгона.
Но тут необходимо помнить, что схема пуска двигателя с переключением “звезда-треугольник” имеет и свой недостаток: уменьшение пускового момента приблизительно на 30 процентов.
Схема переключения обмоток статора
Запуск электродвигателя по схеме «звезда-треугольник»
Практически любое производство в наши дни не обходится без мощного асинхронного электродвигателя. При запуске такого двигателя пусковой ток в 3-8 раз превышает значение номинального тока, необходимого для работы в нормально-устойчивом режиме.
Большой пусковой ток необходим для того, чтобы раскрутить ротор из состояния покоя. Для этого необходимо приложить гораздо больше усилий, чем для дальнейшего поддержания постоянного числа оборотов в заданный промежуток времени. Значительные величины пусковых токов у асинхронных двигателей являются весьма нежелательным явлением, поскольку это может приводить к кратковременной нехватке энергии для другого подключенного к этой же сети оборудования (падению напряжения). Масса примеров такого влияния встречается как на производстве, так и в быту. Первое, что вспоминается — это «мигание» электрической лампочки при работе сварочного аппарата, но бывают случаи серьезнее: просадка напряжения может стать причиной бракованной партии товара на производстве, что ведет к большим финансовым и трудовым затратам. Большой пусковой ток также может вызвать ощутимые тепловые перегрузки обмотки электродвигателя, в результате чего происходит старение изоляции, ее повреждение и в конечном итоге может произойти сгорание двигателя.
Все это послужило мотивом для поиска решения по минимизации токов пуска. Одним из таких решений является метод запуска двигателя по схеме «звезда-треугольник». Для начала разберемся что же такое «звезда», а что — «треугольник», и чем они отличаются друг от друга. Звезда и треугольник являются самыми распространенными и применяемыми на практике схемами подключения трехфазных электродвигателей. При включении трехфазного электродвигателя «звездой» (см. Рисунок 1) концы обмоток статора соединяются вместе, соединение происходит в одной точке, называемой нулевой точкой или нейтралью. Трехфазное напряжение подается на начало обмоток.
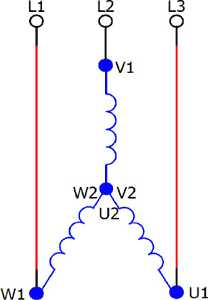 Рисунок 1 — Схема подключения «звезда»
Рисунок 1 — Схема подключения «звезда»При соединении обмоток статора «звездой», соотношение между линейным и фазным напряжениями выражается формулой:
Uл=Uф⋅3U _л= U _ф cdot sqrt{3}где:
Uл — напряжение между двумя фазами;
Uф — напряжение между фазой и нейтральным проводом;
Значения линейного и фазного токов совпадают, т. е. Iл = Iф.
При включении трехфазного электродвигателя по схеме «треугольник» (см. Рисунок 2) обмотки статора электродвигателя соединяются последовательно. Таким образом, конец одной обмотки соединяется с началом следующей, напряжение в этом случае подается на точки соединения обмоток. При соединеии обмоток статора «треугольником» напряжение на фазе равно линейному напряжению между двумя проводами: Uл = Uф.
Рисунок 2 — Схема подключения «треугольник»Однако ток в линии (сети) больше, чем ток в фазе, что описывается формулой:
Iл=Iф⋅3I _л=I _ф cdot sqrt{3}где:
Iл — линейный ток;
Iф — фазный ток.
Получается, что соединяя обмотки «звездой», мы уменьшаем линейный ток, чего изначально и добивались. Но есть и обратная сторона этой схемы: как мы видим из формулы, пусковой момент двигателя прямо пропорционален фазному напряжению:
Mn=m⋅U2⋅r2´⋅p2⋅π⋅f((r1+r2´)2+(x1+x2´)2)M _n = { m cdot U^2 cdot acute r_2 cdot p } over { 2 cdot %pi cdot f( ( r _1 + acute r _2 )^2 + ( x_1 + acute x_2 )^2 )}где:
U — фазное напряжение обмотки статора;
r1 — активное сопротивление фазы обмотки статора
r2 — приведенное значение активного сопротивления фазы обмотки ротора;
x1 — индуктивное сопротивление фазы обмотки статора;
x2 — приведенное значение индуктивного сопротивления фазы обмотки неподвижного ротора;
m — количество фаз;
p — число пар полюсов.
Чтобы было нагляднее, давайте рассмотрим пример: предположим, что рабочей схемой обмотки асинхронного электродвигателя является «треугольник», а линейное напряжение питающей сети равно 380 В, сопротивление обмотки статора Z = 10 Ом. Если обмотки во время пуска подключены «звездой», то уменьшатся напряжение и ток в фазах:
Uф=Uл3=3803=220ВU _ф= {U _л} over { sqrt{3} } = {380} over {sqrt{3}} =220ВФазный ток равен линейному току и равен:
Iф=Iл=UфZ=22010=22AI _ф=I _л= {U _ф} over {Z } = {220} over {10} =22AПосле того, как двигатель набрал необходимые обороты, т. е. разогнался, переключаем обмотки со «звезды» на «треугольник», в этом случае получаем совершенно другие значения тока и напряжения:
Uф=Uл=380BU _ф=U _л =380B Iф=UфZ=38010=38AI _ф = {U _ф} over {Z} = {380} over {10}=38A Iл=3⋅Iф=3⋅38=65,8AI _л= sqrt{3} cdot I _ф=sqrt{3} cdot38=65,8AСоответственно, при пуске двигателя по схеме «звезда», фазное напряжение в √3 раз меньше линейного, а по схеме «треугольник» — они равны. Отсюда следует, что момент при пуске по схеме «звезда» в 3 раза меньше, а значит, запуская двигатель по этой схеме, мы не сможем добиться выхода двигателя на номинальную мощность. Решая одну проблему возникает вторая, не менее острая, чем повышенные пусковые токи. Но единое решение все-таки есть: необходимо скомбинировать схемы подключения двигателя так, чтобы при пуске мощного двигателя не было больших токов в сети, а после того, как двигатель выйдет на необходимые для его работы обороты, происходит переключение на схему «треугольник», что позволяет работать со 100% нагрузкой без каких-либо проблем.
С поставленной задачей прекрасно справляется реле времени Finder 80.82. При подаче питания на реле, мгновенно замыкается контакт, который отвечает за подключение по схеме «звезда». После заданного промежутка времени, на котором обороты двигателя достигают рабочей частоты, контакт схемы «звезда» размыкается и замыкается контакт, который отвечает за подключение по схеме «треугольник». Контакты останутся в таком положении до снятия питания с реле. Наглядная диаграмма работы данного реле представлена на Рисунке 3.
Рисунок 3 — Временная диаграмма реле времени 80.82Рассмотрим более подробно реализацию данной схемы на практике. Она применима только для двигателей, у которых на шильдике указано «Δ/Y 380/660В». На Рисунке 4 представлена силовая часть схемы «звезда-треугольник», в которой используется три электромагнитных пускателя.
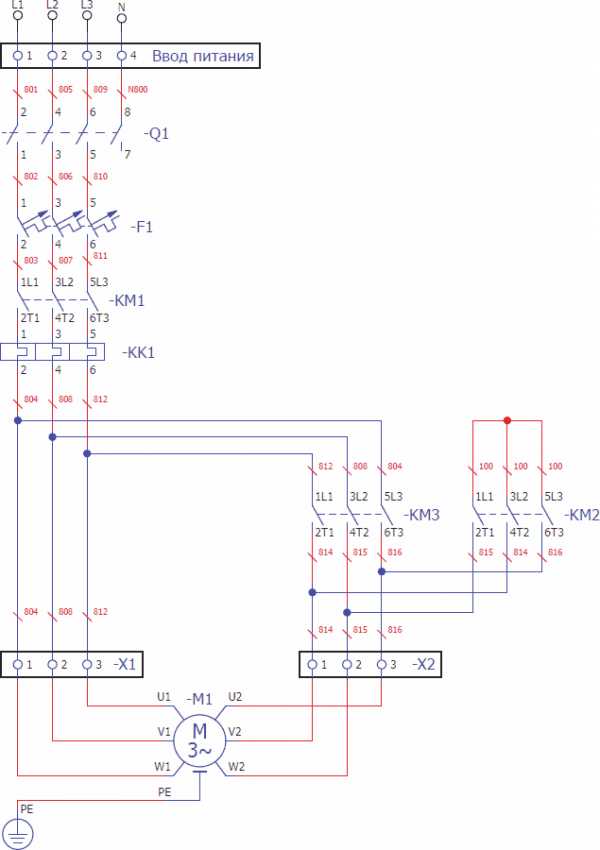 Рисунок 4 — Силовая часть схемы «звезда-треугольник»
Рисунок 4 — Силовая часть схемы «звезда-треугольник»Как было описано ранее, для управления переключением со схемы «звезда» на схему «треугольник» необходимо воспользоваться реле Finder 80.82. На Рисунке 5 представлена схема управления с помощью данного реле.
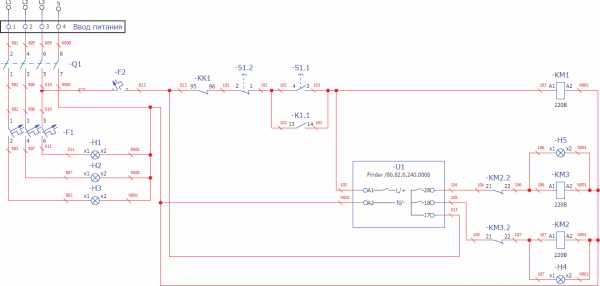 Рисунок 5 — Управление схемой «звезда-треугольник»
Рисунок 5 — Управление схемой «звезда-треугольник»Разберем алгоритм работы данной схемы:
После нажатия кнопки S1.1, запитывается катушка пускателя КМ1, в результате чего, замыкаются силовые контакты КМ1 и при помощи дополнительного контакта КМ1.1 реализуется самоподхват пускателя. Одновременно подается напряжение на реле времени U1. Замыкаются контакты реле времени 17-18 и включается пускатель КМ2. Таким образом, происходит запуск двигателя по схеме «звезда». По истечении времени Т (см. Рисунок 3), контакт реле времени 17-18 мгновенно разомкнется, пройдет задержка времени Tu, и замкнется контакт 17-28. Вследствие чего, сработает пускатель КМ3, который осуществляет переключение на схему «треугольник». Нормально замкнутые контакты пускателей КМ2.2 и КМ3.2 используется для предотвращения одновременного включения пускателей КМ2 и КМ3. Чтобы защитить двигатель от перегрузки, в силовой цепи установлено тепловое реле КК1. В случае перегрузки, тепловое реле разомкнет силовую цепь и цепь управления через контакт КК1.1. Остановка двигателя происходит при нажатии кнопки S1.2, которая разрывает цепь самоподхвата и обесточит катушку пускателя КМ1.
Обобщая написанное, можно сделать вывод, что для облегчения пуска мощного электродвигателя, рекомендуется изначально запускать его по схеме «звезда», что позволяет значительно снизить пусковые токи, уменьшить просадку напряжения в сети, но не позволяет двигателю выйти на номинальный режим работы. Для выхода двигателя на номинальный режим необходимо осуществить переключение обмоток статора на схему «треугольник». Схема переключения обмоток со «звезды» в «треугольник» реализована с помощью реле времени Finder 80.82, в котором устанавливается время разгона электродвигателя.
Список использованной литературы:
- ГОСТ 11828-86 «Определение вращающих моментов и пусковых токов».
- Вешеневский С. Н. Характеристики двигателей в электроприводе. // Издание 6-е, исправленное — Москва, Издательство «Энергия», 1977
- Войнаровский П. Д. Электродвигатели // Энциклопедический словарь Брокгауза и Ефрона: в 86 т. (82 т. и 4 доп.) — СПб., 1890—1907
Читайте также:
Подключение асинхронного двигателя через контактор
Асинхронный двигатель благодаря своей дешевизне и простоте занял прочное место там, где применяется трехфазное напряжение – в промышленном оборудовании. В данной статье рассмотрим схемы на контакторах, которые являются классическими, и служат для подачи питания на двигатель.
Несмотря на то, что сейчас всё шире внедряются электронные способы включения двигателя (устройства плавного пуска, твердотельные пускатели, преобразователи частоты), схема включения двигателя через контактор используется в более чем 75% случаев. И дело не только в дешевизне. В большинстве случаев это обусловлено конкретным применением двигателя – зачем усложнять схему, вводить при проектировании оборудования управление и настройки преобразователя частоты, когда достаточно установить контактор. А при грамотном выборе и подключении контактор прослужит много лет, ничуть не уступая преобразователям частоты по надежности.
Кроме дешевизны, у контактора есть ещё один плюс – он неприхотлив к условиям работы, когда приходится работать во влажных и пыльных условиях, и при высоких температурах (от 35 до 75 °С). В отличии от контактора, для преобразователя частоты обязательное условие – принудительное охлаждение для обеспечения температурного режима (вплоть до установки кондиционеров в электрошкафы), и отсутствие пыли и влаги в воздухе.
Ограничимся рассмотрением подачи трехфазного напряжения на три клеммы двигателя. При этом не будем учитывать тот факт, что напряжение может быть теоретически любым по номиналу и частоте, а включение обмоток двигателя может быть по двум схемам – «звезда» и «треугольник».
Рассматривать будем две части схемы, которые всегда присутствуют – схему управления и силовую часть.
Схема с самоподхватом
Эта схема является классической, и на её основе строится много схем релейной автоматики. В схеме с самоподхватом для пуска двигателя используется кнопка «Пуск» с нормально открытыми контактами, а для остановки – кнопка «Стоп», имеющая нормально закрытые контакты.
Схема в простейшем случае имеет такой вид:
В левой части – схема управления, в правой – силовая часть, питающая двигатель.
На схеме обозначены:
- «+» и «–» - полюса источника питания, его напряжение может быть любым – линейным, фазным, либо пониженным (110 или 24 В)
- SB1 – кнопка «Стоп»,
- SB2 – кнопка «Пуск»,
- К1 – катушка контактора,
- К1.1 – контакты самоподхвата контактора К1.
Принцип работы схемы следующий.
Исходное состояние – контактор выключен, поскольку на его катушку К1 напряжение питания не подается. Контакты кнопки SB1 «Стоп»замкнуты, то ток через них не протекает, поскольку контакты SB2 и К1.1 разомкнуты. Для того, чтобы включить контактор, нужно нажать на кнопку «Пуск». Нажатие может быть кратковременным, достаточным для того, чтобы на катушку К1 было подано напряжение, и контакт К1.1 замкнулся. Как только это произойдёт (обычно, доли секунды), кнопка «Пуск» может быть отпущена, а контактор станет на самоподхват – питание на него будет подаваться через контакт К1.1.
В таком состоянии схема может находиться сколь угодно долго – до тех пор, пока не будет разомкнута цепь питания нажатием кнопки «Стоп», либо не будет снято питание.
Работу схемы можно сравнить с работой триггера (элементарного элемента памяти). Кнопка «Пуск» играет роль установочного входа («Set»), а кнопка «Стоп» выполняет роль входа сброса «Reset». Выходом схемы в нашем случае являются силовые контакты К1.2…К1.4, которые замыкаются, и подают питание на двигатель.
Стоит добавить, что контакты К1.1 и К1.2…К1.4 могут быть конструктивно выполнены по-разному, но обязательное условие – они замыкаются одновременно, при подаче питания на катушку контактора К1.
Схема с самоподхватом и реверсом
Рассмотрим более сложную схему. Она включает в себя устройства и особенности, которые применяются при подключении двигателей с возможностью реверса. Схема предоставляет возможность изменения направления вращения двигателя, что часто применяется для различных практических применений – открывание-закрывание различных задвижек, реверс конвейеров, поднятие-опускание различных грузов, и т.п.
Пояснения к схеме.
SQ1, SQ2 – концевые выключатели ограничения хода механизма. Когда механизм достигает своего крайнего положения (конечной точки пути), один либо другой концевой выключатель активируется, и контактор, включающий двигатель в данном направлении, не включится. Кнопки SB1, SB2 – включают соответственно движение вверх или вниз. В этих кнопках, кроме нормально открытого контакта (SB1.1, SB2.1), имеются блокировочные контакты SB2.2, SB1.2, не позволяющие одновременно включить оба контактора вследствие ошибочных действий оператора.
К1.1, К2.1 – выполняют ту же функцию, что и нормально закрытые контакты кнопок. Разница лишь в том, что оба контактора могут включиться одновременно не только из-за нажатия кнопок, но и по электрическим причинам (неисправность схемы), либо заклинивания (в том числе принудительного) одного из контакторов. Кроме того, используется механическая блокировка.
К1.2…К1.4 и К2.2…К2.4 – силовые контакты, через которые питаются обмотки двигателя. Реверс обеспечивается вследствие того, что 1-я и 3-я фазы на верхних клеммах контактора К2 подключены наоборот.
Защита
Во всех схемах, рассмотренных выше, мы не показали в целях упрощения важные элементы силовой части схемы – элементы защиты двигателя. Эти элементы защищают от следующих негативных факторов:
- Обрыв одной из фаз,
- Перекос питающих фазных напряжений,
- Механическая перегрузка или заклинивание двигателя,
- Короткое либо межвитковое замыкание в обмотках двигателя,
- Обрыв или замыкание в питающем кабеле.
Любая из этих причин может привести к перегреву двигателя, что в свою очередь может сделать его неисправным. Если же при неисправном двигателе на него будет продолжать поступать напряжение, то это сделает его неремонтопригодным, и даже может привести к пожару.
В качестве защиты двигателя используются автоматические выключатели с регулировкой тока уставки (мотор-автоматы, или автоматы защиты двигателя) и тепловые реле. Мотор-автоматы защищают от короткого замыкания и перегрузки (которые могут произойти по разным причинам), и в большинстве случаев при правильном выборе и настройке их достаточно для защиты. В начале статьи как раз показан такой случай – три контактора питаются через мотор-автоматы.
В прошлом для защиты двигателей использовались автоматические выключатели, не имеющие регулировки, либо имеющие регулировку в малых пределах. Поэтому обязательным было также использование тепловых реле, которые срабатывают только при тепловой перегрузке и отключают контактор двигателя. В настоящее время тепловые реле практически не применяются.
Электрические схемы управления двигателем при помощи электромагнитных пускателей
Нереверсивный пуск асинхронного двигателя с короткозамкнутым ротором
Схема приведена на рисунке 1. Для работы сети необходимо включить рубильник (Q). При нажатии кнопки «пуск» (SB1) катушка контактора (KM) получает питание и замыкает главные контакты в силовой цепи, тем самым происходит подключение двигателя к сети. Одновременно замыкается блок-контакт (KM) цепи управления, которые шунтирует кнопку пуск (SB1).
Для защиты двигателя от перегрузок и от потери фазы применяют тепловые реле (KK1, KK2), которые включаются непосредственно в силовую цепь двигателя.
Если температура обмотки двигателя превысит допустимые значения, то сработает тепловое реле и разомкнет свои контакты в цепи управления (KK1, KK2), тем самым обесточит катушку контактора (KM) и двигатель остановиться.
Для отключения необходимо нажать кнопку «стоп» (SB2).
Для защиты двигателя от токов короткого замыкания служат плавкие предохранители (FU).
Реверсивный пуск асинхронного двигателя с короткозамкнутым ротором
Такая схема запуска приведена на рис. 2.
Пуск двигателя начинается с включения рубильника (Q). При нажатии кнопки «вперед» (SB1) образуется цепь тока, катушки контактора (KM1). Замыкаются силовые контакты (KM) и шунтирующий блок-контакт, а контакт (KM1) в цепи контактора (KM2) размыкается.
При нажатии кнопки «назад» (SB3) контактор (KM1) разомкнется и двигатель остановится. Контакт (KM1) в цепи катушки (KM2) замыкается, следовательно, образуется цепь включения контактора (KM2), который замыкает свои силовые контакты. Двигатель резко тормозит и по достижении скольжения равного единице (S=1) останавливается и ротор начинает вращаться в обратную сторону, то есть происходит реверс двигателя. Размыкающие контакты (KM1, KM2), которые введены в цепь разноименных катушек контакторов, выполняют защиту от одновременного включения обоих контакторов, то есть осуществляют блокировку.
Для зажиты двигателя от токов короткого замыкания установлены плавкие предохранители (FU), для защиты от перегрузок – тепловое реле (KK1, KK2).
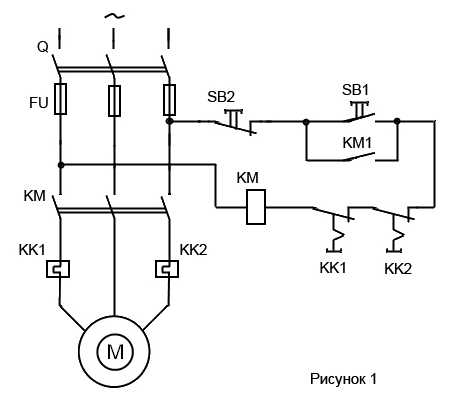
Если статья хоть немного помогла, поставьте, пожалуйста, лайк:
...или подпишитесь на новости:
схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Как изменить скорость асинхронного двигателя
Скорость вращения асинхронного двигателя можно изменить тремя способами:
- путем изменения количества пар полюсов,
- путем смены слипа,
- изменением частоты питающего напряжения. то есть с помощью инвертора
Изменение числа пар полюсов вызывает изменение скорости вращающегося магнитного поля.Для двух полюсов скорость 3000 об/мин, для четырех полюсов 1500 об/мин. Один двигатель может быть рассчитан на два разных числа пар полюсов. Регулирование скорости осуществляется переключением между обмотками статора с изменением числа пар полюсов. Переключение с меньшего числа пар полюсов на большее должно быть адаптировано к скорости двигателя. Если переключение произойдет слишком быстро, двигатель войдет в зону генератора, что может привести к его повреждению.
Регулировку скольжения можно выполнить двумя способами.Напряжение питания статора можно изменить без изменения частоты. Крутящий момент двигателя зависит от квадрата напряжения, подаваемого на статор. Изменения в цепи ротора могут происходить путем вставки резисторов в цепь ротора или добавления в цепь дополнительного напряжения. Ротор может управляться только
в случае кольцевых двигателей из-за возможности доступа к его обмоткам.
Скорость изменяется за счет увеличения потерь мощности в роторе.Подсинхронный каскад также можно использовать для управления скоростью асинхронного двигателя. В этом методе цепи ротора подключаются через токосъемные кольца к дополнительному генератору постоянного тока или управляемому выпрямительному мосту. Изменение величины вводимого напряжения вызывает изменение намагниченности двигателя и скорости его вращения.
Частотное регулирование - в этом случае можно регулировать скорость двигателя с минимальными потерями энергии. Скорость вращающегося магнитного поля изменяется с частотой.Для поддержания постоянного крутящего момента напряжение питания должно изменяться в зависимости от частоты.
Пуск со стартером
Пуск с стартер
Этот метод запуска может быть используйте только для круговых двигателей.
Ложь включается в цепь обмотки ротора регулируемого сопротивления (плавно или ступенчато) дополнительный, называется стартер . Двигатель выходит из строя к сети с включенным пускателем в цепь ротора на наибольшее сопротивление (позиция 4 на рис. б). После достижения правильную скорость, переключите стартер на следующую стопы (позиция 3), а затем до короткое замыкание стартера. Отрицания должны приходить в такое время, чтобы не появляется ток, превышающий пусковой ток. При преждевременном отрицание из одной степени в другую было бы неопределенным, чрезмерным «Поражение электрическим током» и резкое увеличение крутящего момента.Это было бы насильственные причины ускорят и беспокойную работу машины. Слишком поздно минус один градус с другой - увеличивает время ботинок. От правильного подбора кардиостимулятора и способа его использования течение явлений при пуске зависит. Чем больше количество шагов стартера, тем плавнее и короче будет пуск. Управление устройством пускатели могут быть ручными или автоматическими.
Пускатели предназначены для периодической или повторно-кратковременной работы (только в период пуска) i поэтому они рассчитываются с точки зрения тепла за короткое время работы.Вы должны, так помните, что стартер нельзя использовать для продолжительной работы , если можно перегрева и повреждения.
Аналогично кольцевым двигателям с временем пуска дополнительный сопротивления, двигатели с текущим перемещением ведут себя, поэтому двигатели с двойной клеткой и гебокобкове.
Значение для пускового анализа упомянем явление самозапуска двигатель. О, даже с коротким Если напряжение пропало или значительно уменьшилось, скорость снижается вращающееся колесо, и двигатель может заклинить.Если продолжительность отключения электроэнергии короче, чем время, необходимое двигателю для остановки с момента его выключения от сети можно поддерживать запуск двигателя и при определенных условиях по мере увеличения напряжения он вернется к нормальной работе через некоторое время. Процесс это называется самозапускающимся двигателем.
Пуск двигателя с кольцевым звеном стартером четырехступенчатый: a) системное соединение (B - предохранители, Q - автоматический выключатель, R - стартер), б) схема система запуска, c) кривые крутящего момента M и ток I
.
Тормоз электродвигателя - что это такое и для чего он нужен?
Одной из важнейших задач является торможение вращения электродвигателя. В зависимости от версии источника питания имеются тормоза постоянного или переменного тока.
Торможение относится ко многим случаям изменения значения скорости. Он включает в себя не только остановку привода (преднамеренную, аварийную), снижение частоты вращения, а прежде всего изменение направления вращательного движения подвижных элементов.Узнайте, для чего нужен тормоз электродвигателя.
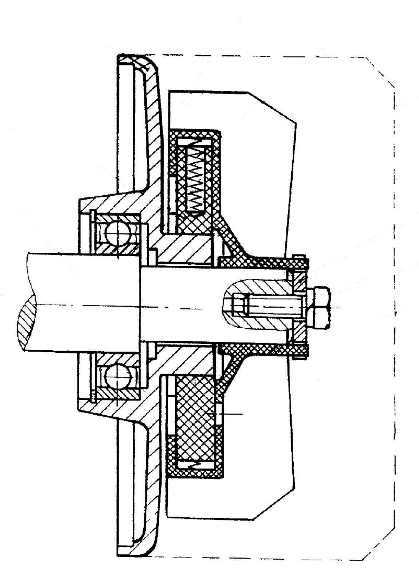
Рис. 1 Принципиальная схема тормоза электродвигателя
Для чего используется тормоз электродвигателя?
Как вы уже догадались, многие рабочие машины должны быть оборудованы моторным тормозом .
Способ такого торможения может потребоваться для различных целей, таких как:
- повышение безопасности труда лица, управляющего машиной
- сокращение времени или расстояния выбега механизмов машины
- Остановки элементов машины в определенном положении,
Или хотя бы сокращение времени простоя между этапами технологического процесса.
Торможение в электродвигателях
- Динамическое торможение (постоянным током)
- Однофазное торможение (субсинхронное)
- Торможение противотоком
- Свободное торможение
- Механическое торможение
5
Торможение электрическим двигателем 9004 динамический
Использование этого типа тормоза заключается в прекращении подачи переменного тока на машину с одновременной подачей постоянного напряжения на обмотку статора.Этот метод создает стационарное магнитное поле, которое действует на ротор двигателя. Вращение двигателя, а также стационарное магнитное поле создают отрицательное скольжение и связанный с ним тормозной момент. Преимуществом использования этого типа тормоза является меньшая тепловая нагрузка (привод берет из сети только энергию, необходимую для возбуждения). При снижении скорости до нуля направление вращения не изменяется (нулевое скольжение). Динамическое торможение может осуществляться управляемым выпрямителем или преобразователем частоты.
Однофазное торможение
Принцип этого торможения заключается в отключении любой фазной цепи, питающей электродвигатель, и последующем замыкании накоротко отключенной цепи питающей фазы цепью любой фазы, оставшейся в питании. Одновременно включив сопротивление (соответствующим образом подобранные параметры) в цепь третьей из фаз, питающих автомат. При этом методе надо иметь в виду, что величина тормозного момента пропорциональна скорости вращения ротора/ротора.Преимущество его использования заключается в простой технической реализации аксессуаров для тормозной системы.
Противоточное торможение
Этот метод является одним из самых простых и дешевых. Его использование особенно заметно в системах, требующих поддержания постоянной скорости опускания манипулируемых и транспортируемых элементов. Характеризуется относительно быстрой остановкой и изменением направления вращения электродвигателя. К достоинствам можно отнести изменение направления вращения магнитного поля в электродвигателе (переключение цепей любых двух фаз, питающих двигатель).В процессе переключения электромагнитное поле ротора и статора вращаются в одном направлении. В результате смены фаз, питающих статор-статор, создается встречно вращающееся (по отношению к направлению вращения ротора) магнитное поле. К преимуществам решения можно отнести быстрое изменение отдачи, генерируемой электродвигателем. Высокая интенсивность обмоточных токов (в зависимости от конструкции двигателя и момента инерции тормозимых элементов, а также от того, что вся энергия торможения накапливается в конструкции двигателя) может привести к повреждению двигателя (значительный нагрев обмоток).Наиболее распространенной мерой предотвращения повреждения является определение на этапе выбора двигателя завышения параметров, особенно параметра изоляции ротора. Несмотря на указанные недостатки, этот метод считается очень эффективным средством для остановки электродвигателей.
Свободное торможение
Заключается в отключении источника питания двигателя и медленном торможении вращения двигателя силой сопротивления движению, включающей момент сопротивления, трение, инерцию и сопротивление воздуха.Мы должны помнить, что время остановки находится в строгой зависимости от сопротивления, возникающего в результате эффективности двигателя и моментов, нагружающих систему привода.
Механическое торможение
Этот метод используется в тех случаях, когда требуется надежность торможения (даже после отключения питания электродвигателя). При выборе тормоза следует помнить о таких важных параметрах, как: крутящий момент и располагаемая мощность торможения, временная величина, задержка срабатывания тормоза, допустимое количество пусков (в час) времени работы и отпускания тормоза.
Предложение магазина EBMiA включает в себя широкий ассортимент электродвигателей с тормозом, с определенными параметрами и принципом работы.
В первую очередь следует помнить, что метод торможения следует подбирать индивидуально в каждом приложении. Помните о многих функциях преобразователей частоты и требованиях безопасности приводных систем.

Рис. 2 Электродвигатель с тормозом
Электромагнитный тормоз

Рис.3 Типы электромагнитных тормозов
Электромагнитные тормоза отличаются простой конструкцией и возможностью регулировки таких параметров, как тормозной момент и время торможения. Дополнительным преимуществом является тихая работа, что крайне важно, когда устройство, в котором применяется тормоз, управляется несколькими приводами, работающими с высокой частотой срабатываний. Тормозной момент можно точно отрегулировать с помощью регулировочной гайки. Конструкция тормоза гарантирует простую и беспроблемную установку.Доступны различные стили исполнения с точки зрения оснащения, питания тормоза, климатических условий использования, что позволяет подобрать подходящий вариант для конкретных условий использования.
Тормоза постоянного тока с возможностью питания от источника переменного тока после подключения выпрямительной системы, поставляемой с тормозом по требованию заказчика электромагнитные устройства переменного тока.Они обеспечивают очень короткое время работы (торможение и растормаживание). Несмотря на сложную конструкцию электромагнита, они гарантируют простоту системы управления - соединения с источником переменного тока, например клеммы распределительной коробки двигателя, составляют строгую механическую и электрическую структуру.
В других статьях мы описываем:
Подшипники для электродвигателей
.Трехфазный асинхронный двигатель, вызывающий нашееееее
| ЛАБОРАТОРИЯ ЭЛЕКТРИЧЕСТВО И ПРИВОД | Академический год 2013/2014 | |
| Вид обучения: МТ_СИ | ||
| Тема упражнения: Трехфазный асинхронный двигатель | ||
| Состав секции:
| Направление: MiBM Семестр: В Группа: 4 Секция: 2 | |
| Преподаватель: Кшиштоф Штимельски, доктор философии, инженер | ||
| Дата исполнения: 10.12.2013 | Дата ввода в эксплуатацию: 16.12.2013 | Счет: |
I. Цель упражнения:
Целью этого упражнения является изучение конструкции, работы и характеристик движения асинхронного двигателя с короткозамкнутым ротором.
II. Теоретическое введение:
1. Трехфазный асинхронный двигатель с кольцевым ротором:
а) Дизайн:
Асинхронный двигатель имеет магнитопровод из тонких стальных листов, изолированных друг от друга для уменьшения потерь на вихревые токи.Эти листы должным образом разрезаны, чтобы сформировать пазы, в которые помещаются трехфазные обмотки.
В пазах статора обмотки смещены друг к другу на угол 120°. Обычно все шесть концов трех фаз вводятся так, чтобы машину можно было подключить по схеме треугольника или звезды.
Ротор также имеет трехфазную обмотку - стержень или катушку с концами, соединенными с тремя токосъемными кольцами, позволяющими подключать внешнюю цепь при пуске, торможении и регулировании скорости.Обмотки трехфазного ротора обычно соединены звездой.
Часто ротор имеет устройство подъема щеток, которое позволяет кольцам смыкаться вместе в конце пуска, при этом щетки остаются поднятыми, а машина работает как двигатель с короткозамкнутым ротором.
б) Принцип действия:
Если на систему из трех катушек, расположенных в пространстве одна к другой под углом 120°, подается симметричный трехфазный ток, т.е.сдвинутые во времени на угол 120°, без учета нелинейности, вызванной насыщением, эти обмотки будут давать синусоидальные магнитные потоки. Они сдвинуты во времени на угол 120°.
В пространстве эти потоки занимают неизменное положение по отношению к неподвижным соответствующим виткам, и они сдвинуты по отношению друг к другу, как витки, на угол 120°. В любой момент они дают результирующий поток в пространстве, равный векторной сумме составных потоков.
С течением времени мгновенные значения токов в отдельных фазах постоянно меняются.Таким образом, меняются значения координат результирующего вектора магнитного потока - меняется положение этого вектора на плоскости xy. Магнитное поле вращается, совершая один оборот на 360° за один период Т. Таким образом, число оборотов в секунду численно равно частоте тока, а угловая скорость вращения поля равна пульсации тока. Отсюда вывод:
«Результирующее магнитное поле системы из трех катушек, следовательно, представляет собой вращающееся круговое поле, вектор которого вращается с угловой скоростью»
Вращающееся магнитное поле индуцирует электродвижущую силу в обмотке ротора, которая вызывает протекание тока в роторе.Механическая сила создается взаимодействием между этим током и вращающимся магнитным полем. На каждую пару проводников, несущих ток, действует пара сил, создающих крутящий момент, который пытается повернуть ротор в направлении вращающегося магнитного поля. Этот крутящий момент изменяется от нуля до тех пор, пока скорость ротора не станет равной синхронной скорости. Тогда относительная скорость равна нулю и токи, наведенные в обмотке ротора, перестают течь. Следовательно, для того, чтобы ротор был подвержен крутящему моменту, он должен вращаться со скоростью ниже синхронной, т.е. асинхронно.
Разница между скоростью поля вращения и скоростью ротора, связанная с синхронной скоростью, называется скольжением асинхронного двигателя.
2-й трехфазный асинхронный двигатель с короткозамкнутым ротором:
а) Дизайн:
Статор машины имеет трехфазную обмотку, встроенную в пазы. Обмотки сдвинуты друг к другу на угол 120°. Обычно все шесть концов трех фаз вводятся так, чтобы машина могла быть соединена звездой или треугольником.
Обмотка ротора короткозамкнутого двигателя отлита из алюминия, вплавленного в заготовки пластин ротора. В более мощных двигателях голые медные или латунные стержни помещаются в пазы ротора и соединяются с обеих сторон торцевыми кольцами.
В результате обмотка и пакет из листового металла образуют единое целое, способное выдерживать высокие механические и термические нагрузки. для более высоких мощностей используются роторы с глубокими канавками или с двойной клеткой.
В дополнение к обычным типам конструкций трехфазных двигателей с короткозамкнутым ротором существует ряд специальных конструкций, наиболее распространенными из которых являются:
- Двигатели рольгангов с внешним ротором, используемые для привода рольгангов и конвейерных лент.
- двигатели линейные, используемые для привода шаровых мельниц, конвейеров и других тихоходных механизмов, а также электромагнитных насосов для жидких металлов.
б) Принцип действия:
Принцип работы двигателей с короткозамкнутым ротором в основном такой же, как у кольцевых двигателей. Обмотку с короткозамкнутым ротором можно рассматривать как многофазную обмотку с числом фаз, равным числу стержней клетки ротора. Количество полюсов всегда такое же, как и в статоре.
Эксплуатационные свойства этих двигателей в значительной степени зависят от степени смещения тока в стержнях ротора. При незначительном смещении тока свойства двигателей с короткозамкнутым ротором аналогичны кольцевым двигателям с компактной схемой ротора.
Способы управления скоростью двигателя включают пары полюсов, регулирование частоты и напряжение питания.
III. Результаты измерений:
Их можно найти на приложенных к отчету карточках, которые были записаны во время учений.
IV. Расчеты и графики:
1. Данные, считанные с паспортной таблички двигателя, необходимые для дальнейших расчетов:
а) P n - номинальная активная мощность (на валу двигателя) в кВт:
P n = 1,5 кВт
б) U n - номинальное напряжение (провода) статора в В:
- в звездной системе:
U N = 380 В
- в треугольнике:
U N = 220 В
c) I n - номинальный (линейный) ток статора в А:
- в звездной системе:
I n = 3,8 А
- в треугольнике:
I n = 6,5 А
d) n n - номинальная скорость в об/мин:
$$ n_ {n} = 930 \ frac {\ text {rev}} {\ min \} $$ 90 204 90 011
e) cos φ n - номинальный коэффициент мощности
cos φ n = 0,74 90 204
f) f n - номинальная частота питающего напряжения в Гц:
f n = 50 Гц
2.Номинальная полная мощность, потребляемая из сети:
$$ \ слева | S_ {n} \ справа | = \ \ sqrt {3 \} {\ bullet U} _ {n} \ bullet I_ {n} $$ 90 204
а) в звездной системе:
$$ \ слева | S_ {n} \ справа | = \\ sqrt {3 \} \ пуля 380В \ пуля 3,8А $$
| S n | = 2501,08 В • А
б) в виде треугольника:
$$ \ слева | S_ {n} \ справа | = \\ sqrt {3 \} \ пуля 220В \ пуля 6,5А $$
| S n | = 2476,83 В • А
3.Номинальная активная мощность, потребляемая от сети:
$$ P_ {1n} = \ \ sqrt {3 \} {\ bullet U} _ {n} \ bullet I_ {n} \ bullet \ cos \ varphi_ {n} $$ 90 204
а) в звездной системе:
$$ P_ {1n} = \\ sqrt {3 \} \ пуля 380В \ пуля 3,8А \ пуля 0,74 $$
П 1 Н = 1850, 80 Ш
б) в виде треугольника:
$$ P_ {1n} = \ \ sqrt {3 \} \ пуля 220В \ пуля 6,5А \ пуля 0,74 $$
П 1 Н = 1832, 86 Ш
4.Номинальная реактивная мощность, потребляемая из сети:
$$ Q_ {1n} = \ \ sqrt {3 \} \ пуля U_ {n} \ пуля I_ {n} \ пуля \ sin \ varphi_ {n} $$ 90 204
а) в звездной системе:
$$ Q_ {1n} = \\ sqrt {3\} \ пуля 380В \ пуля 3,8А \ пуля 0,67 $$
Q 1 n = 1675, 72 вар
б) в виде треугольника:
$$ Q_ {1n} = \ \ sqrt {3 \} \ пуля 220В \ пуля 6,5А \ пуля 0,67 $$
Q 1 n = 1659, 48 вар
5.Номинальное скольжение:
$$ s_ {n} = \ frac {n_ {s} - n_ {n}} {n_ {s}} $$ 90 204 90 011
$$ s_ {n} = \ frac {\ frac {60 \ bullet f} {p} - \ n_ {n}} {\ frac {60 \ bullet f} {p}} = \ frac {\ frac { 60 \ bullet 50 \ text {Гц}} {3} - \ 930 \ frac {\ text {обр}} {\ min}} {\ frac {60 \ bullet 50 \ text {Гц}} {3}} $$
с п = 0,07
6. Номинальный крутящий момент:
$$ M_ {n} = \ 9,55 \ пуля \ frac {P_ {n}} {n_ {n}} $$ 90 204 90 011
$$ M_ {n} = \ 9,55 \ bullet \ frac {1,5 \ text {кВт}} {930 \ frac {\ text {обр}} {\ min}} = 9,55 \ bullet \ frac {1500 \ frac { N \ bullet m} {s}} {15,5 \ frac {\ text {обр}} {s}} $$ 90 204 90 011
M n = 924, 19 Нм 90 204
7.Номинальная эффективность:
$$ \ eta_ {n} = \ frac {P_ {n}} {P_ {1n}} $$ 90 204 90 011
а) в звездной системе:
$$ \ eta_ {n} = \ frac {1500 \ Вт} {1850,80 \ Вт} $$
η n = 0,81
б) в виде треугольника:
$$ \ eta_ {n} = \ frac {1500 \ Вт} {1832,86 \ Вт} $$
η n = 0,82
8. Участки |I|=f (P в ):
а) I 1 = f (P в ):
б) I 2 = f (P в ):
в) I 3 = f (P в ):
11.График n = f (от P до ):
12. Диаграмма s = f (P в ):
13. График M = f (P в ):
14. Графики n = f(|I|):
а) диаграмма n = f (I 1 ):
б) диаграмма n = f (I 2 ):
в) диаграмма n = f (I 3 ):
15. График n = f (M):
16. График s = f (M):
В.
1. Методы пуска асинхронных двигателей:
а) Прямой пуск:
Прямой пуск заключается в подключении двигателя с короткозамкнутой обмоткой ротора непосредственно к сети на номинальное напряжение при номинальной частоте.В начальной фазе пуска ротор неподвижен (скольжение двигателя s = 1). Тогда потребляется большой пусковой ток, в несколько раз (4 - 10) превышающий номинальный ток двигателя, а пусковой момент может быть ниже номинального момента. Большой пусковой ток двигателя нежелателен для самого двигателя и питающей сети, вызывая нагрев обмоток двигателя большими перепадами напряжения в питающей сети, проявляющимися, например, гашением лампочек.
б) Пуск с автотрансформатором:
Используемые для этой цели трансформаторы имеют постоянную или регулируемую (плавно или ступенчато) кратность напряжения.Напряжение сети должно быть равно номинальному напряжению статора. Пуск двигателя начинается с установки значения напряжения, соответствующего принятому непревышаемому пусковому току. Затем, если трансформатор имеет регулируемый коэффициент, напряжение, питающее двигатель, постепенно увеличивают до номинального значения.
c) Пуск со стартером:
Этот тип пуска можно использовать только в кольцевых двигателях.Он заключается во включении в цепь обмотки ротора регулируемого (плавно или ступенчато) добавочного сопротивления, называемого пускателем. Двигатель подключается к сети пускателем, настроенным на наибольшее сопротивление, подключенное к цепи ротора. После достижения соответствующей скорости переключайте стартер на следующую ступень и последовательно до тех пор, пока стартер не закоротится. Изменения должны происходить в такой момент, чтобы не возникал ток, превышающий начальный пусковой ток.При преждевременном переключении с одной ступени на другую возникнет нежелательный чрезмерный «бросок тока» и резкое увеличение крутящего момента, что приведет к быстрому ускорению и неустойчивой работе машины.
d) Пуск с сопротивлением, включенным в цепь статора:
Этот тип пуска используется только для маломощных двигателей, т. к. он ограничивает пусковой ток, но в то же время очень существенно снижает пусковой момент.
e) Пуск с переключателем звезда-треугольник:
Переключатель звезда-треугольник может использоваться только для запуска асинхронных двигателей, у которых шесть выводов обмотки статора подключены к клеммной колодке. Напряжение сети должно быть равно номинальному напряжению обмотки статора, соединенной треугольником. Двигатель подключается к сети с выключателем «пуск» в положении, когда обмотка статора соединена звездой.Ротор двигателя начинает вращаться. Как только скорость вращения ротора стабилизируется, установите переключатель в положение, при котором обмотка статора соединена треугольником.
VI. Выводы:
Из приведенных выше графиков можно сделать вывод, что с увеличением нагрузки такие параметры, как ток, номинальный коэффициент мощности, скольжение, крутящий момент и до определенного момента КПД увеличиваются. С другой стороны, параметр, который уменьшается, - это обороты. Ток увеличивается, потому что двигателю требуется больший ток для продолжения вращения.Увеличение скольжения связано с трудностью поддержания вращения. Увеличение крутящего момента вызывает нагрузку на двигатель, при этом КПД увеличивается, поскольку двигатель имеет наибольший КПД при соответствующей нагрузке, характерной для данного двигателя.
При изменении сопротивления большинство параметров быстро изменяются при мощности около 450 Вт или достигают пика при другой мощности. Наименьшим изменением является номинальный коэффициент мощности, который почти соответствует графику, построенному без резистора.
Поисковик
Связанные подстраницы:
Задача о трехфазном асинхронном двигателе
Испытание трехфазного асинхронного двигателя с короткозамкнутым ротором
Испытание трехфазного асинхронного двигателя с короткозамкнутым ротором (1), SGGW TRiL, Elektrotechnika Tril Sggw
09-start-up и торможение трехфазных асинхронных двигателей, Познаньский технологический университет
(PP) - трехфазный асинхронный двигатель, Дан трехфазный асинхронный двигатель (3-фазный
Пуск асинхронного двигателя с короткозамкнутым ротором, Вызванный, двигатели
Двигатель Стирлинга ćw14 производства pawelekm. мотор, Морская академия - механические материалы, школа, Мега школа, школа, ELEKTRA
ćw14, семестр 5 , семестр V, Convers я Энергии,
Асинхронный двигатель - кольца lab1, Морской университет - механические материалы, школа, Мега школа
Клеточные асинхронные двигатели с автотрансформатором, Морская академия - механические материалы, школа
Приводы асинхронного двигателя корпус
Исследование трехфазного двигателя с короткозамкнутым ротором
Плавная маркировка тормоза, СТУДИЯ СЕНТЯБРЬ, Делаем двигатели, ОД СУБЕРЛАКА, двигатели внутреннего сгорания, Спра
заранее, ИЗУЧЕНИЕ СЕНТЯБРЬ, Двигатели делаем, ОД СУБЕРЛАКА, двигатели внутреннего сгорания, Причинно
классы, Асинхронные двигатели, Тип
подробнее похожие страницы
.Скорость реверса для однофазного двигателя
Я уже описывал в блоге, как преобразовать вращение на контакторах для трехфазного двигателя, в этом посте я покажу, как можно преобразовать вращение для однофазного двигателя. Следующая запись будет об однофазном асинхронном двигателе с короткозамкнутым ротором. Однофазные двигатели с короткозамкнутым ротором снабжены конденсатором, предназначенным для задержки напряжения в одной из обмоток, которая называется пусковой (обычно в двигателях до прим.1,5кВт) или вспомогательная обмотка (для большей мощности). В случае пусковых обмоток конденсатор отключается (например, с помощью центробежного выключателя), когда скорость двигателя достаточно высока. С другой стороны, конденсатор в случае вспомогательных обмоток все еще подключен к цепи. В двигателях, где необходим больший крутящий момент, используются два конденсатора, которые включаются в обмотки вспомогательной цепи. Один постоянно подключен к цепи (рабочий конденсатор), а другой подключается только до тех пор, пока двигатель не достигнет соответствующей скорости.Такой конденсатор также имеет большую емкость, чем рабочий конденсатор. Это пусковой конденсатор.
Соотношение рабочей и вспомогательной обмоток 2/3.
В однофазном короткозамкнутом двигателе вращение изменяется путем изменения направления тока в одной из обмоток двигателя. Замена фазы нулевым проводом ничего не даст!
| Преобразователь скорости для однофазного двигателя |
Этого, наверное, достаточно для такой базовой информации ооднофазных двигателей и для изменения направления вращения. Теперь я покажу вам, как вы можете сделать это изменение вращения с помощью пакетного переключателя и контакторов.
Система с использованием пакетного коммутатора
Для приведенной ниже схемы нам нужен только автоматический выключатель двигателя (соответствующий мощности двигателя) и пакетный переключатель с 3 каналами и 6 контактами (называемый кулачковым переключателем L 0 P).| Преобразование скорости однофазного двигателя с помощью переключателя |
- переключатель среднего положения — нет контакта; двигатель выключен, переключатель
- в левом положении - контакты 1-2, 7-8, 9-10, 11-12 включены; обороты двигателя влево, переключатель
- в правом положении - контакты 3-4, 5-6, 9-10, 11-12 включены; двигатель вращается по часовой стрелке,
| коммутатор Контакты | 1-2 | 3-4 | 5-6 | 7-8 | 9-10 | 11-12 | |
| Выключатель в левом положении | 1 | 0 | 0 | 1 | 1 | 1 | |
| 0 | 0 | 0 | 0 | 0 | 0 | ||
| правый выключатель | 0 | 1 | 1 | 0 | 1 | 1 | |
| 1 = проводящий | 0 = непроводящий | ||||||
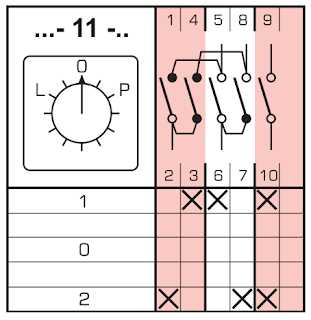 |
| Источник: apator.com |
Я также опишу, как мы соединяем вышеуказанный переключатель с двигателем и блоком питания.
Подключите фазу от сети к контакту 9 .Выход двигателя U соединен с контактом 10 . Нулевой провод подключается непосредственно к контакту В двигателя. Затем подключаем конденсатор между контактами 10 и 2 . Подключаем нулевой провод к контакту 6 . Соедините контакт 5 и 8 с контактами Z1 и Z2 двигателя.
Выключатель двигателя (F2), используемый на этой схеме, предназначен для трехфазного двигателя, но ничто не препятствует его использованию с однофазным двигателем.В случае автоматического выключателя фазный провод подключается последовательно к контактам 1-2 и 3-4, а нулевой провод размещается на контактах 5-6. На этой схеме я меняю направление тока на вспомогательных обмотках. Если двигатель оборудован пусковой обмоткой, то подсоедините выключатель обмотки, например, к проводу Z1.
Стоит отметить, что при отсутствии питания и включенном направлении вращения мотор включится сам при восстановлении питания. Такая неожиданная активация может быть опасна для нашей жизни или здоровья.
Система с использованием контакторов
На следующей схеме мы будем использовать контакторы для преобразования оборотов однофазного двигателя с короткозамкнутым ротором. Преимущество контакторов в том, что при отключении питания и его повторном включении через некоторое время двигатель не включится сам по себе - его придется включать вручную. Контактор также действует как защита от пониженного напряжения, если напряжение в сети падает. 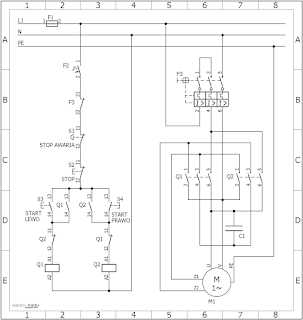 |
| Преобразование скорости для однофазного двигателя с использованием января |
ПРЕДУПРЕЖДЕНИЕ!
В системе присутствует опасное для жизни напряжение. Прикосновение к токоведущим частям может привести к поражению электрическим током.Неправильное подключение системы может привести к повреждению компонентов. Автор записи не несет ответственности за причиненный ущерб. Вы оформляете договор на свой страх и риск. .Неразрушающий и разрушающий контроль, аккредитация - CBiDGP Sp. о.о.
Аналоговые клещи
Цифровые клещевые амперметры
Панельные амперметры
Датчики температуры ктм
Электронные измерители температуры
Электрические измерительные и сигнальные цепи с согласующим сопротивлением цепей
Кенетроны переменного и постоянного тока до 75 кВ
Конденсаторы декады
Электронные счетчики
Люксметры
Манометры или вакуумметры
Таймеры
Измерители для измерения импеданса контура повреждения
Аналоговые измерители для измерения сопротивления заземления
Цифровые измерители сопротивления заземления
Многофункциональные электронные счетчики
Аналоговые измерители сопротивления изоляции
Цифровые измерители сопротивления изоляции
Универсальные аналоговые счетчики
Цифровые универсальные счетчики
Измерительные мосты
Технические мосты Уитстона и Томпсона
Многодиапазонные декадные технические резисторы
Престостаты
Трансформаторы рабочего токамногодиапазонный
Переключатель гидравлических, пневматических или электрических цепей
Фазовращатели
Преобразователь давления или дифференциального давления
Регистратор электрических или неэлектрических значений
Термометры и термометры сопротивления
Регулирующие трансформаторы (автотрансформаторы)
Электронная схема м.б.часть до 10 транзисторов или до 5 интегральных схем
Электронная схема до 20 интегральных схем
Электронная схема более 10 транзисторов или до 10 интегральных схем
Тип измерительного корпуса vam
Ваттметры и счетчики
Переключатель многоточечного измерения температуры
Индикаторы напряжения
Индикаторы напряжения с системой управления до 1000 вольт
Капиллярные индикаторы температуры
Индикаторы вольтметра
Диагностика изоляции обмоток
Оценка изоляции подшипников
Оценка состояния соединений ротора машины постоянного тока
Оценка состояния соединений в обмотках генератора постоянного тока
Оценка состояния соединений в обмотках двигателя постоянного тока мощностью свыше 100кВт
Проверка контакторного выключателя
Бесконтактное измерение температуры
Измерение тока утечки в сети до 6кВ прямым методом
Измерение тока заземления сети до 6 кВ косвенным методом
Длительная запись с использованием микропроцессорных регистраторов и компьютеров
.Чем отличается контактор стартера 2022
Разница между контактором и пускателем
В промышленном, коммерческом и гражданском строительстве все задачи, связанные с пуском и остановом двигателей, оборудованных дистанционным управлением, решают контакторы и пускатели двигателей. Эти устройства применяются везде, где требуется непрерывный пуск или коммутация сильноточных электрических устройств. Рассмотрим, что это за устройства и чем они отличаются друг от друга.
Содержание статьи
- Определение
- Сравнить
- Выводы Разница. номер
Определение
Контактор представляет собой привод, представляющий собой блок быстродействующих переключателей (т.е. контактных групп). Это может быть автономное устройство или часть другого оборудования. Контактор представляет собой дистанционно управляемое распределительное устройство, предназначенное для частого переключения электрических цепей с номинальными (нормальными) режимами работы. Замыкание или размыкание контактов обычно осуществляется с помощью электромагнитного привода.Отличительной особенностью контакторов по сравнению с электромагнитным реле, выполняющим те же функции, является то, что они разрывают электрическую цепь в нескольких местах, а цепь электромагнитного реле обычно разрывается только в одной точке.
Пускатель (магнитный) - модифицированный контактор с дополнительными устройствами (обычно это тепловые реле, предохранители, дополнительная контактная группа или устройства для пуска электродвигателя).
к содержанию ↑Сравнить
Контакторы бывают трех типов: переменного тока, постоянного тока, иногда постоянного переменного тока.
Аппаратура постоянного тока предназначена для включения и отключения электропотребителей в цепях постоянного тока; в устройствах многократного автоматического включения, в приводах высоковольтных выключателей. Это оборудование (однополюсное и двухполюсное) устройств, предназначенных для работы с напряжением от 22 до 440 В и силой тока до 630 А

Устройства переменного тока, используемые для обеспечения возможности пуска нагревательных резисторов, для управления трехфазным асинхронным двигателем с короткозамкнутым ротором, для пуска трехфазных электромагнитов, тормозных Устройства переменного тока предназначены для коммутация цепей переменного тока.
Магнитные приводыобычно используются для дистанционного управления трехфазными электродвигателями с короткозамкнутым ротором. Электромагнитный исполнительный механизм - комбинированное электромеханическое и распределительное устройство управления для запуска и разгона до номинальной частоты вращения двигателя, а также для обеспечения его бесперебойной работы, защиты подключенных цепей и двигателя от перегрузок и провалов рабочего напряжения. Магнитные пускатели, оснащенные ограничителями перенапряжения, используются в системах управления с помощью микропроцессорной техники.Пускатели работают с переменным напряжением от 24 до 660 В и частотой 50-60 Гц или постоянным напряжением от 34 до 440 В

ЗАКЛЮЧЕНИЕ Topinfoweb.com. номер
- Контактор может быть автономным устройством или частью другого оборудования.
- Контактор представляет собой устройство, в котором подвижные контакты расположены на вращающемся валу. При вращении подвижных контактов возле неподвижных, в результате чего запускается электродвигатель.На стартере подвижные контакты производят возвратно-поступательные движения.
- Контактор - группа быстродействующих контактов, предназначенная для многократного включения через заданный промежуток времени и управляемая от внешнего источника.
- Стартер - самостоятельный механизм, оснащенный дополнительным оборудованием: Автомат термозащиты для запуска двигателя или несколько контактных групп, а также предохранители.
- Электропривод, кроме простого включения/выключения, осуществляет переключение направления вращения ротора электродвигателя путем изменения чередования фаз, для этого добавляются дополнительные контакторы.
- Контакторы, по сравнению со пускателями, могут перемещать большие токи.








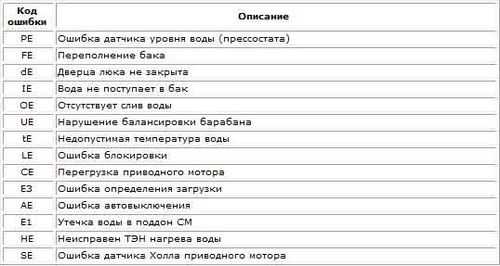
 Вызов дизайнера:
Вызов дизайнера:


Действующие акции

скидка для внимательных клиентов 7% от общей стоимости заказа.

